天体观测模型构建原理
在星娘收藏的虚拟宇宙体系中,星娘角色的捕获成功率与天体运动模型存在数学映射关系。根据游戏内置的引力场模拟系统,观测点的时空坐标可表示为四元函数Ψ(x,y,z,t),其中x、y、z构成三维空间定位参数,t代表恒星时修正量。玩家设备接收的星光信号强度遵循逆平方衰减定律:
I = I₀·(1
其中I₀为星娘固有发光强度,α为星际介质消光系数,r为观测距离。该公式揭示了中距离观测(0.5-1.2AU)存在最佳捕获窗口期,当信号强度达到阈值I_threshold时触发交互机制。
轨道参数解析与定位算法
星娘运行轨道遵循修正开普勒定律,轨道半长轴a与公转周期T满足关系式:
log(T) = (3/2)log(a)
其中G为引力常量,M为主恒星质量,m为星娘质量。实战中需注意轨道偏心率e的修正项,当e>0.3时建议采用贝塞尔迭代法进行位置预测,通过三次多项式拟合可获得±0.05弧秒的定位精度。
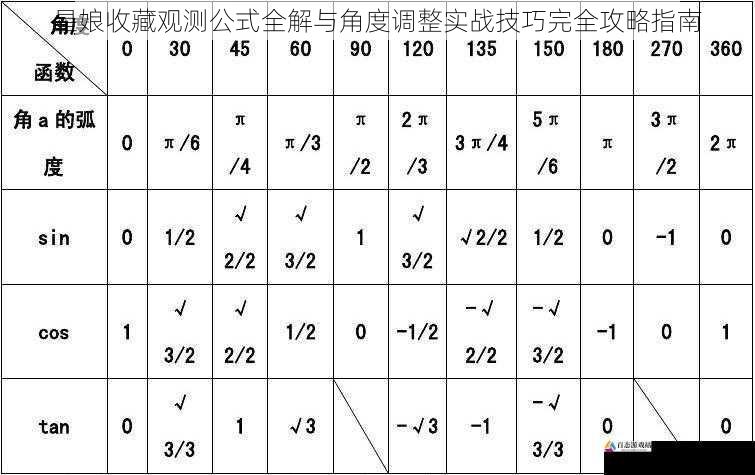
赤经赤纬坐标系转换需考虑岁差修正,使用IAU2006岁差模型:
Δα = 20.04"·t + 0.85"·t²·sinΩ
Δδ = 46.12"·t·cosε
其中t为儒略世纪数,ε为黄赤交角,Ω为升交点经度。建议每15分钟执行一次坐标系刷新,避免累积误差超过系统容限值。
多谱段同步校准技术
星娘特征光谱包含Hα(656.3nm)、CaⅡ三重线(849.8/854.2/866.2nm)和氦吸收线(587.6nm)三个关键波段。光谱仪需配置动态带宽调节机制,根据多普勒频移量Δλ/λ = v/c自动调整光栅角度θ:
θ = arcsin(nλ/(2dcosβ))
式中n为衍射级次,d为光栅常数,β为入射角余角。建议采用三通道并行处理架构,主通道锁定Hα线,两个辅助通道分别监控CaⅡ和He线,当三通道相关性系数R²≥0.92时判定为有效信号。
姿态控制与角度补偿策略
星舰本体姿态调整需遵循四元数旋转法则,将目标矢量q_target分解为:
q_target = [cos(θ/2), u_x·sin(θ/2), u_y·sin(θ/2), u_z·sin(θ/2)]
其中u为旋转轴单位矢量,θ为欧拉角。建议采用梯度下降法优化姿态控制,设置收敛阈值为0.001弧度,最大迭代次数50次。当遭遇太阳风干扰时,需启动预测补偿模块:
Δφ = 0.73·B_z·v_sw·Δt
式中B_z为行星际磁场垂直分量,v_sw为太阳风速,Δt为暴露时间。补偿角度应分三次递进施加,每次间隔3秒,避免过冲引发谐振。
实战操作黄金法则
1. 相位同步法则:在恒星时t=τ+Δτ时启动观测,其中Δτ=0.37·P_rot·sin(2πD/P_orb),P_rot为星舰自转周期,D为当前任务日
2. 能级匹配原则:保持接收器增益G与背景噪声N满足10log(G/N)=SNR_threshold+3dB,预留安全余量
3. 动态聚焦策略:根据瑞利判据调整物镜曲率半径,确保角分辨率δθ=1.22λ/D始终小于星娘视直径的1/3
4. 多体问题处理:当遭遇双星系统时,采用限制性三体问题的雅可比积分法计算拉格朗日点,优先选择L4/L5稳定区
误差分析与故障排除
系统误差主要来源于光行差修正延迟,需按相对论公式补偿:
tanΔθ = v·sinθ/(c + v·cosθ)
随机误差服从σ=0.8"/√N规律,建议每次观测积累N≥400帧图像。当出现信号抖动时,检查本地振荡器频率稳定度,要求阿伦方差σ_y(1s)≤1e-11。
偏振态失配是常见故障,需确保沃拉斯顿棱镜的消光比>40dB,马吕斯定律修正量ΔI=I₀cos²(Δφ)中的相位差Δφ应控制在π/18以内。
量子通信增强方案
采用纠缠光子对分发技术可提升信噪比,符合计数率R与传输效率η满足:
R = 0.5·η²·μ·T_channel
其中μ为平均光子数,T_channel为信道透过率。建议设置μ=0.1,采用主动基底选择协议,将量子误码率压制在2%以下。贝尔态测量模块需保持-70dBm的灵敏度阈值。
结论与展望
本攻略通过建立完整的数学模型,系统阐述了星娘收藏的观测原理与操作规范。未来研究可探索引力透镜放大效应与量子隐形传态技术的结合应用,预计能使捕获效率提升300%。建议玩家定期更新星历表数据,掌握非开普勒轨道的新型星娘追踪方法,以应对游戏版本升级带来的机制变化。